You can also find my articles on my Google Scholar profile.
COAST Robotic Guidewire
 The Co-Axially Aligned STeerable (COAST) guidewire (PATENT PENDING) is the newest version of a robotically steerable guidewire with an outer diameter of 0.4 mm. The guidewire has a single degree-of-freedom, and demonstrates follow-the-leader motion along with feed-forward motion. The guidewire is able to achieve high curvatures at varying bending lengths. Therefore the guidewire can be used in minimally invasive surgical procedures involving pediatric carotid arteries, peripheral artery disease procedures, or procedures involving navigating around the aortic bifurcation or the aortic arch.
The Co-Axially Aligned STeerable (COAST) guidewire (PATENT PENDING) is the newest version of a robotically steerable guidewire with an outer diameter of 0.4 mm. The guidewire has a single degree-of-freedom, and demonstrates follow-the-leader motion along with feed-forward motion. The guidewire is able to achieve high curvatures at varying bending lengths. Therefore the guidewire can be used in minimally invasive surgical procedures involving pediatric carotid arteries, peripheral artery disease procedures, or procedures involving navigating around the aortic bifurcation or the aortic arch.
Publications:
- S. Jeong, Y. Chitalia (co-first author), and J.P. Desai, “Design, Modeling, and Control of a Coaxially Aligned Steerable (COAST) Guidewire Robot,” in IEEE Robotics and Automation Letters. 10.1109/LRA.2020.3004782
Patents:
- J. P. Desai, Y. Chitalia, S. Jeong, “System, Method, And Apparatus For The Control Of Multiple Degrees-Of-Freedom Bending And The Bending Length Of A Coaxially Aligned Robotically Steerable Guidewire,” Provisional patent, 63/013425 , 2020
Robotic Pediatric Neuroendoscope

 The robotic pediatric neuroendoscope is a tendon-driven robotic tool with a handheld controller designed for minimally invasive surgeries for treating pediatric hydrocephalus. The tool itself is a cylindrical tube of 1.93 mm (outer diameter) with two notch joints micromachined within it using a femtosecond laser (see laser setup and SEM image of joint to the left). Both joints of the robotic tool are in the same plane, allowing the robot to make S-shaped curves in any plane (GIF to the left). The plane of bending can further be changed by a rolling motion capability in the handheld controller (see CAD to the left). The resulting tool is controlled using a joystick located at the back end of the handheld controller. Thus, the robotic tool and its controller are ergonomic in their design and fully compatible with existing endoscopes used in hydrocephalus cases.
The robotic pediatric neuroendoscope is a tendon-driven robotic tool with a handheld controller designed for minimally invasive surgeries for treating pediatric hydrocephalus. The tool itself is a cylindrical tube of 1.93 mm (outer diameter) with two notch joints micromachined within it using a femtosecond laser (see laser setup and SEM image of joint to the left). Both joints of the robotic tool are in the same plane, allowing the robot to make S-shaped curves in any plane (GIF to the left). The plane of bending can further be changed by a rolling motion capability in the handheld controller (see CAD to the left). The resulting tool is controlled using a joystick located at the back end of the handheld controller. Thus, the robotic tool and its controller are ergonomic in their design and fully compatible with existing endoscopes used in hydrocephalus cases.
Publications:
- Y. Chitalia, S. Jeong (co-first author), K. K. Yamamoto, J. J. Chern, and J.P. Desai, “Modeling and Control of a Meso-scaleMulti-Joint Continuum Robot for Pediatric Neurosurgery,” in IEEE Transactions on Robotics, doi: 10.1109/TRO.2020.3031270.
- Y. Chitalia, S. Jeong, N. Deaton, J. J. Chern and J. P. Desai, “Design and Kinematics Analysis of a Robotic PediatricNeuroendoscope Tool Body,” in IEEE/ASME Transactions on Mechatronics.
- Y. Chitalia, S. Jeong, J. Bok, V. Nguyen, S. Melkote, J. J. Chern, J. P. Desai, “Towards the Design and Development of aPediatric Neuroendoscope Tool,” 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),Macau, China, 2019, pp. 2998-3004.
- Y. Chitalia, X. Wang, V. Nguyen, S. Melkote, J. J. Chern, and J. P. Desai, “Design and Analysis of a Bidirectional Notch Joint for a Robotic Pediatric Neuroendoscope,” in International Symposium on Experimental Robotics, (pp. 24-33). Springer,Cham., November 2018
Patents:
- J. P. Desai,Y. Chitalia, S. Jeong, J. J. Chern, “Steerable and flexible robotic endoscopic tools for minimally invasiveprocedures,” PCT Patent, PCT/US20/20942, patent pending, 2020
- J. P. Desai,Y. Chitalia, S. Jeong, J. J. Chern, “Multi-port, steerable, and flexible robotic endoscopic tools for minimally invasiveprocedures,”U.S. Patent Application No. 62/813,444, patent pending, 2019
Media Coverage:
- Steerable Robotic Instruments Could Help Pediatric Neurosurgeons, Research Horizons, July 2019.
Robotic Guidewire
In this project, we have designed and analyzed a 0.4 mm single degree-of-freedom and a 0.78 mm two degree-of-freedom robotic guidewire for cardiovascular applications. The guidewire makes use of a Femtosecond laser to micromachine notch joints into a Nitinol tube allowing it to bending in the plane of the notch joint with the application of a moment from a tendon. See the papers below for more static models and controls details of the guidewire.
Publications:
- Y. Chitalia, X. Wang and J. P. Desai, “Design, Modeling and Control of a 2-DoF Robotic Guidewire,”2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, 2018, pp. 32-37.
Patents:
- J. P. Desai,Y. Chitalia “Systems and Methods for Steering Guidewires,” PCT Patent, PCT/US2018/021784, patentpending, 2019
- J. P. Desai,Y. Chitalia “System, Method, and Apparatus for Active Control of Multiple Degrees-of-Freedom Micro-Scale Guidewires and Devices,” U.S. Patent Application No. 62/469,570, patent pending, 2017
Media Coverage:
Miniature Force Sensor
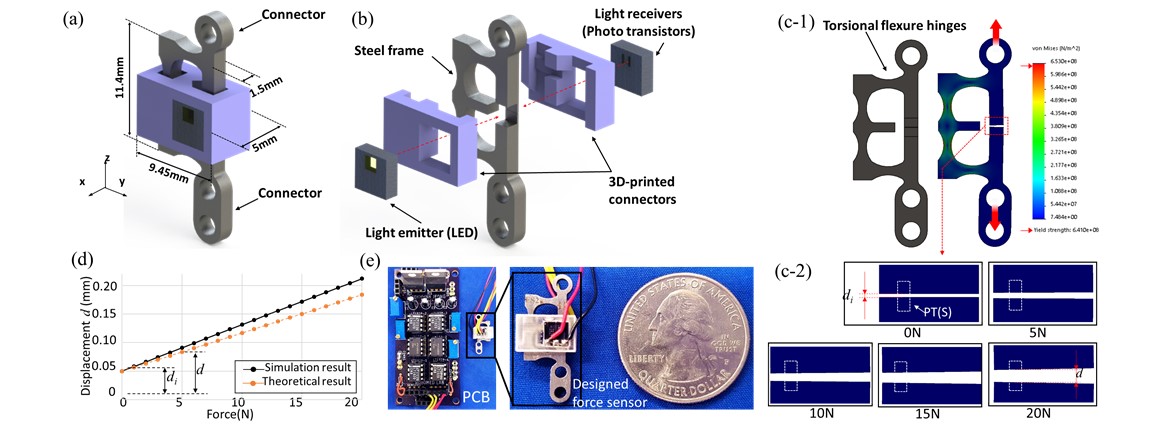 This work presents a photointerrupter based force sensing mechanism to implement a low-cost, high accuracy, and reliable sensor with a miniaturized design. Most force sensors are either too bulky or if they are small, they usually have a narrow range of linear output and are significantly vulnerable to external disturbances. This makes it difficult to use these sensors in precision force measurement and feedback control especially in handheld medical robotics. The optimized geometry of the screen and a novel dual-screen arrangement are proposed to increase the linear range of the sensor output. A dual-phototransistor signal acquisition is introduced to compensate the external disturbances and provides robust sensor output. The sensor has the ability to measure forces up to 21 Newtons, having 1.08% nonlinearity, 0.83% hysteresis, and 99.58% accuracy. The proposed model and sensing mechanisms are experimentally validated.
This work presents a photointerrupter based force sensing mechanism to implement a low-cost, high accuracy, and reliable sensor with a miniaturized design. Most force sensors are either too bulky or if they are small, they usually have a narrow range of linear output and are significantly vulnerable to external disturbances. This makes it difficult to use these sensors in precision force measurement and feedback control especially in handheld medical robotics. The optimized geometry of the screen and a novel dual-screen arrangement are proposed to increase the linear range of the sensor output. A dual-phototransistor signal acquisition is introduced to compensate the external disturbances and provides robust sensor output. The sensor has the ability to measure forces up to 21 Newtons, having 1.08% nonlinearity, 0.83% hysteresis, and 99.58% accuracy. The proposed model and sensing mechanisms are experimentally validated.
Publications:
- S. Jeong, Y. Chitalia and J. P. Desai, “Miniature Force Sensor based on Dual-photointerrupter with High Linearity and Disturbance Compensation,” in IEEE Sensors Journal.
Large Deflection Shape Sensing - Continuum Robots
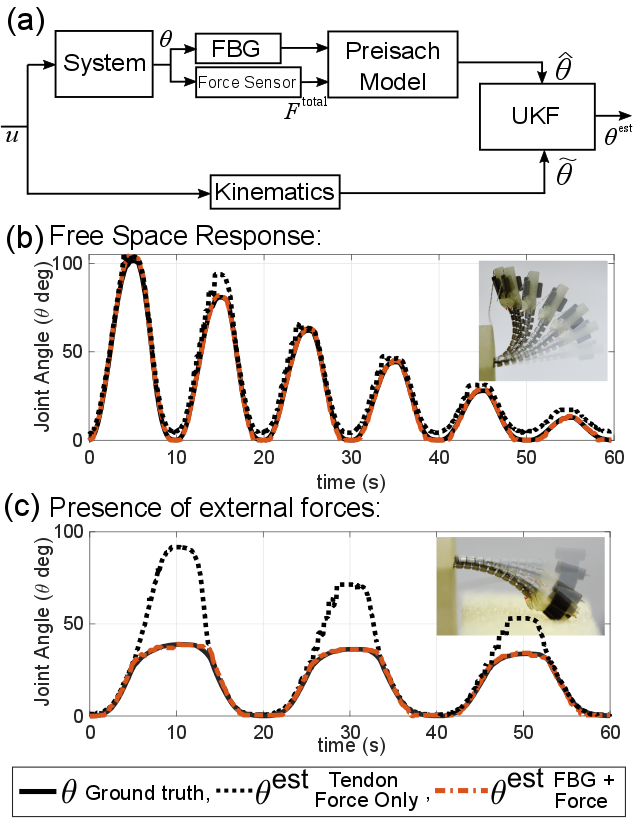
Endovascular and endoscopic surgical procedures require micro-scale and meso-scale continuum robotic tools to navigate complex anatomical structures. Previous work has failed at achieving large deflections at micro-scale and meso-scale robots. In this work, we have developed a sensor by mounting an FBG fiber within a micromachined nitinol tube whose neutral axis is shifted to one side due to the machining. This shifting of the neutral axis allows the FBG core to experience compressive strain when the tube bends. The compact sensor allows repeatable and reliable estimates of the shape of both scales of robots with minimal hysteresis. This sensor can measure curvatures as high as 145 /m, and can estimate shape even in the presence of external forces or kinematic uncertainties (see image (c) to the left).
Publications:
- Y. Chitalia, N. J. Deaton, S. Jeong, N. Rahman and J. P. Desai, “Towards FBG-Based Shape Sensing for Micro-Scale and Meso-Scale Continuum Robots With Large Deflection,” in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp.1712-1719, April 2020.
Class Project: CS 7637 Knowledge Based AI
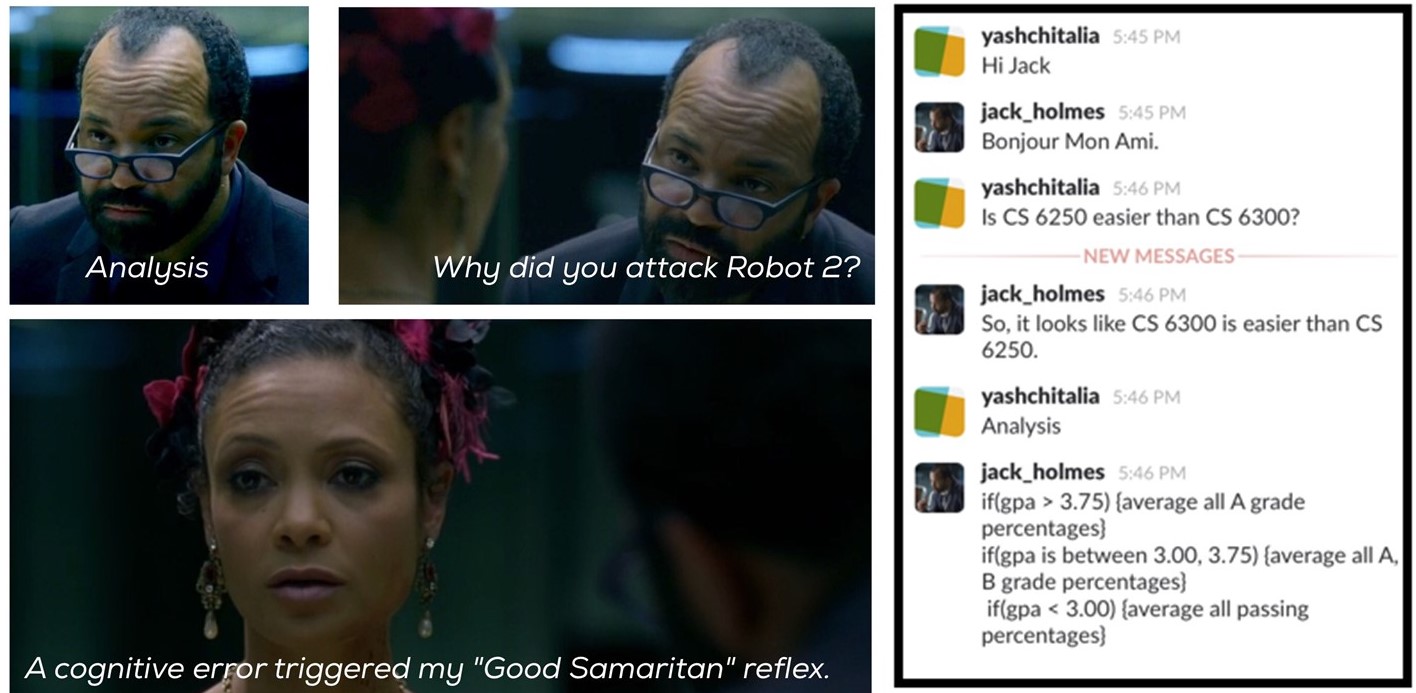 I took a class called CS 7637: Knowledge Based AI in Fall 2016. They were experimenting with a new class project of a chat-bot for GT students in that semester. A select few students were given the option to build an agent that tackles some of the problems incoming CS students face. I decided I was going to focus on an agent that answers the questions of Online Masters students at Georgia Tech. Here are some details about the robot: The name of the chat-bot I have designed is Jack Holmes, and this agent is able to handle the following types of queries from the user. Note: The agent can also handle various variants of the following questions:
I took a class called CS 7637: Knowledge Based AI in Fall 2016. They were experimenting with a new class project of a chat-bot for GT students in that semester. A select few students were given the option to build an agent that tackles some of the problems incoming CS students face. I decided I was going to focus on an agent that answers the questions of Online Masters students at Georgia Tech. Here are some details about the robot: The name of the chat-bot I have designed is Jack Holmes, and this agent is able to handle the following types of queries from the user. Note: The agent can also handle various variants of the following questions:
- What are the prerequisites for AI?
- What is the required reading material for the Embedded Systems class?
- What is the grading policy for Data and Visual Analytics?
- Who is the instructor for CS 6300?
- What is CSE 6242 about?
- What computer do I need to watch KBAI lectures?
- What is the course name of CS 6262?
- What is the course number of Artificial Intelligence?
- What is the likelihood of getting an A grade in KBAI?
- What’s the chance of passing Machine Learning?
- What’s the average GPA of a student taking Machine Learning for Trading?
The student can also answer subjective questions based on preferences they have given at the start of the chat with the student. Here are some samples of the subjective questions: I have attempted to answer the following questions:
- Is KBAI better for me than AI?
- Is CS 6400 easier than CS 6440?
- Plan my Online Masters.
Similarly, I have also used the notion of context to answer the following types of questions:
- Why did you say that?
- Why did you infer that?
- Analyze that.
I was heavily inspired by the television Sci-fi show called Westworld, where the robot programmers often use a similar technique to debug their robots (figure \ref{fig:westworld}).